最近,擅长仿生机械的Festo(费斯托)又公布了他们的新作:一只模仿人手制造的柔性机械手。

在视频演示中,这只机械手从人类手中接过一个正十二面体,紧接着就熟练地盘了起来:
这只机械手看起来就像是一只戴了白手套的人手,不过它的设计思路和人手并不相同。机械手内部并没有“肌肉”牵拉“骨骼”的设计,而是利用气动装置驱动的,外面包裹着传感器、电路以及弹性纤维和硅橡胶组成的“皮肤”。
机械手内部的气动装置
除了灵活柔软的手指,这只机械手还有另外一个亮点:在实际开始操作之前,它就能提前学会如何抓握物体。
当机械手拿到一件物体时,它会首先利用3D相机和深度传感器建立物体的虚拟模型,并通过AI进行模拟学习,在一次次的虚拟试错练习中掌握不会把物体弄掉的正确抓握方法。这样能更快地学会操作各种物体。
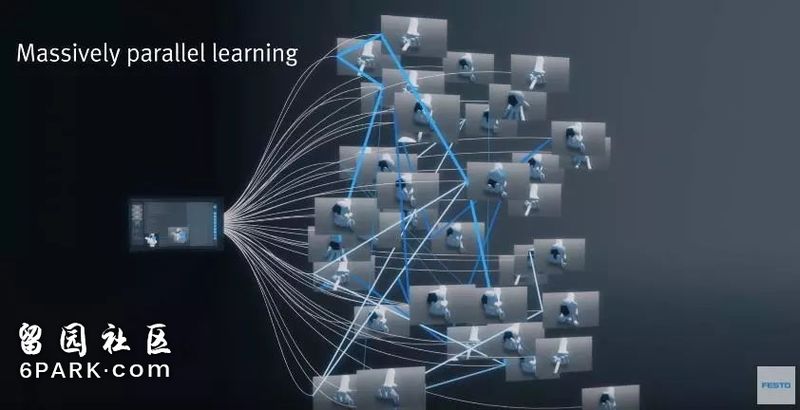
示意图:机械手自带的AI在模拟中学习如何抓握物体
Festo这家公司一直以创造各种仿生机器而闻名,除了人手,自然界的各种动物也都是他们的灵感来源。下面我们来回顾一下他们过去推出过哪些有趣的仿生机器人。
仿生小鱼
这是一条机器鱼,但它游动的方式看起来并不像鱼。这条“小鱼”其实是参考海涡虫的游泳方式制造的。
这是一个涡虫,物种应该是Pseudobiceros hancockanus
机器小鱼身体两侧的鳍由硅胶制成,每一边的鳍都连着9个小杠杆臂,由伺服电机控制运动。两边鳍的摆动可以分别控制,方便转向,另外头部还有一个电机可以控制小鱼向上或向下游。
仿生蝙蝠
这只白色大蝙蝠是参考狐蝠特征制造的。和真的蝙蝠一样,它的翅膀是一张有弹性的皮膜,并且可以通过骨架对翅膀形状进行调节,这样能实现更灵活的飞行控制。仿生机器蝙蝠的一大亮点是它的重量非常轻。这只机器蝙蝠翼展228厘米,体长87厘米,但重量只有580克。
仿生翻滚蜘蛛
在介绍这个仿生机器人之前我们需要先了解一下它的原型:一种生活在摩洛哥沙漠地区的蜘蛛(Cebrennus rechenbergi)。科学家发现,这些蜘蛛有一种特别的翻滚技巧(如下图),这能帮助它们快速地进行移动。
翻滚的蜘蛛,感觉是一个自由操满分了。原视频:Sci-News.com

而Festo也仿照这种蜘蛛的样子制造了一个可以走也可以滚的机器人。不过,他们的版本少了两条腿,而且看起来也没有那么欢脱。
触手系机械臂

这个机械臂名叫OctopusGripper,它看起来不会有真章鱼的那种黏糊糊的不适感,不过从真正的章鱼那里借鉴来了腕足和吸盘的结构,可以牢牢抓住各种物品。
还可以给你倒杯水:
除此之外,他们还做过仿生企鹅、仿生袋鼠、仿生蝴蝶……不知道这家永远脑洞大开的公司将来还能给我们带来什么惊喜呢。


